HK330 Computer CNC panel ကိုတွေ့တယ်။
ထုတ်ကုန်ဗီဒီယို
ကွန်ပျူတာ CNC panel ကို HK330 တွေ့တယ်။
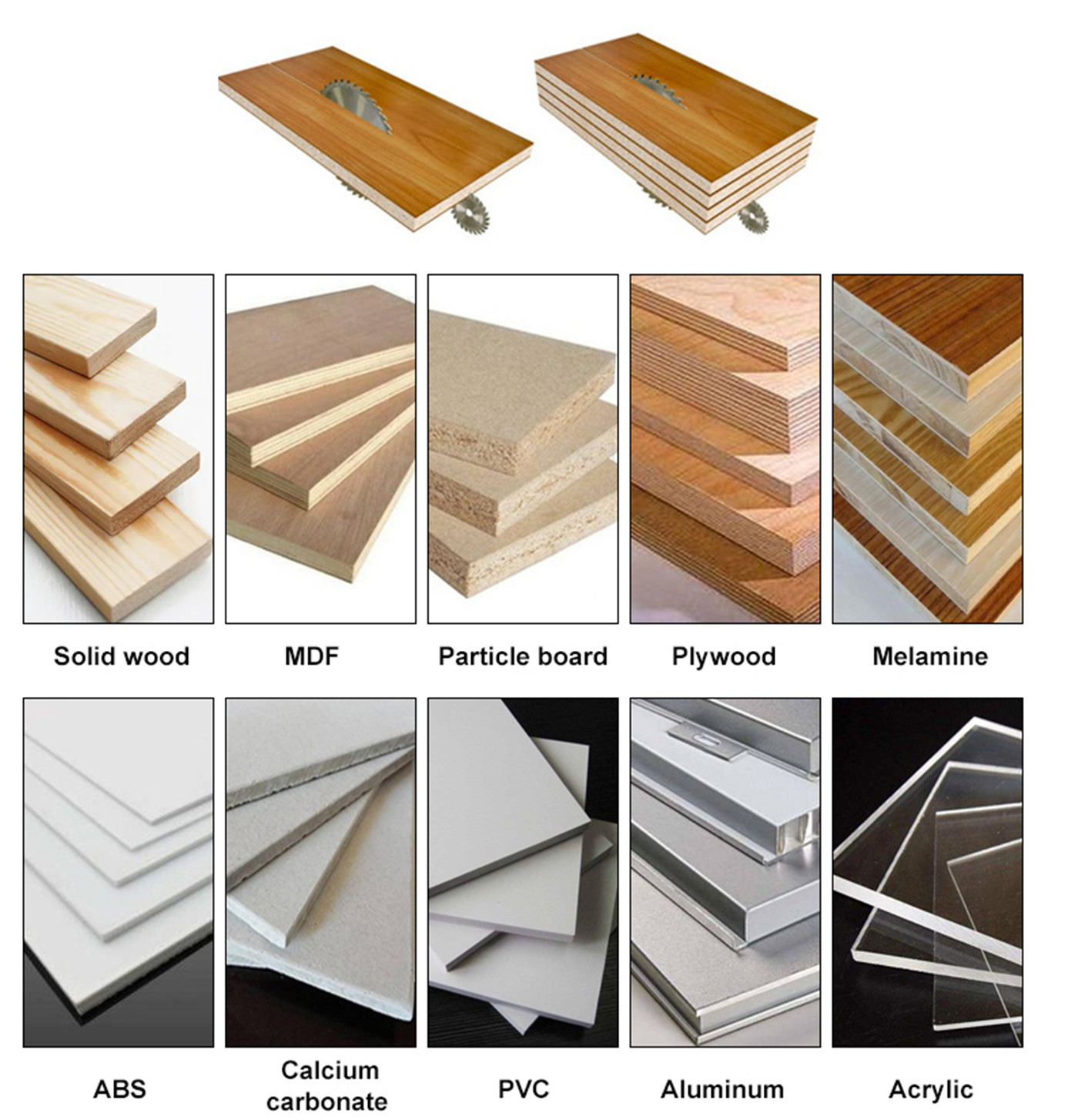
1. ထည့်သွင်းပန်းကန်အကျယ်အတိုင်း၊ လိုအပ်သောပန်းကန်ပြားကိုဖြတ်ပြီး မူလအလုပ်လုပ်သည့်အခြေအနေသို့ အမြန်ပြန်သွားပါ။
2. ဖြတ်တောက်ခြင်းအမြန်နှုန်းကို မတူညီသောအထူနှင့် မတူညီသောပစ္စည်းများကို ကျော်လွှားနိုင်သည့် ကြိမ်နှုန်းပြောင်းစက်ဖြင့် ထိန်းချုပ်ထားသည်။
3. အစာကျွေးခြင်းသည် pneumatic ရေပေါ်ပုတီးစေ့စားပွဲကို လက်ခံရရှိပြီး လေးလံသောပန်းကန်ပြားကို ပြောင်းလဲရန် လွယ်ကူသည်။ စက်ရုပ်သည် အလိုအလျောက် အစာကျွေးခြင်း၊ လုပ်သားပြင်းထန်မှု နည်းပါးပြီး ထုတ်လုပ်မှု ထိရောက်မှု မြင့်မားသည်။
4. အတုအမှားအယွင်းကို ဖယ်ရှားရန်နှင့် အတိုင်းအတာတိကျမှုကို မြှင့်တင်ရန် တင်သွင်းလာသော Delta ဆာဗာမော်တာကို အသုံးပြုပါ။
နည်းပညာဆိုင်ရာ ကန့်သတ်ချက်များ
| HK330 | PARAMETER |
| အများဆုံးဖြတ်တောက်မှုမြန်နှုန်း | 0-80m/မိနစ် |
| Max Carrier အမြင့်ဆုံးအမြန်နှုန်း | 100m/min |
| Main Saw Motor Power | 16.5kw (optional 18.5kw) |
| စုစုပေါင်းပါဝါ | 26.5kw (optional 28.5kw) |
| အများဆုံးလုပ်ငန်းအရွယ်အစား | 3300L*3300W*100H(mm) ရွေးချယ်နိုင်သော 120H(mm) |
| အနိမ့်ဆုံးအလုပ်အရွယ်အစား | 34L*45W(mm) |
| စုစုပေါင်းအရွယ်အစား | 5300L*5950W*1900H(mm) |

အများဆုံးလွှအရွယ်အစား 2800 * 2800 မီလီမီတာနှင့် လွှအထူ 105 မီလီမီတာ ရှိသော ပန်းကန်ပြားကြီးများ ပြုပြင်ခြင်း၏ လိုအပ်ချက်များနှင့် ကိုက်ညီပြီး ပိုမိုကျယ်ပြန့်စွာ အသုံးပြုနိုင်သည်

Servo စက်ကလစ်လက်ကိုင် 11 တစ်ခုတည်းအကြီးဆုံးဒီဇိုင်းစက်မှုကလစ်

စက်ရုပ်လက်တံသည် ± 0.1 မီလီမီတာ ဖြတ်တောက်သည့် တိကျမှုဖြင့် တိကျသော သန်ကောင်ဂီယာလျှော့ကိရိယာနှင့် အစာကျွေးသည့် ဂီယာကွင်းကို အသုံးပြုသည်။
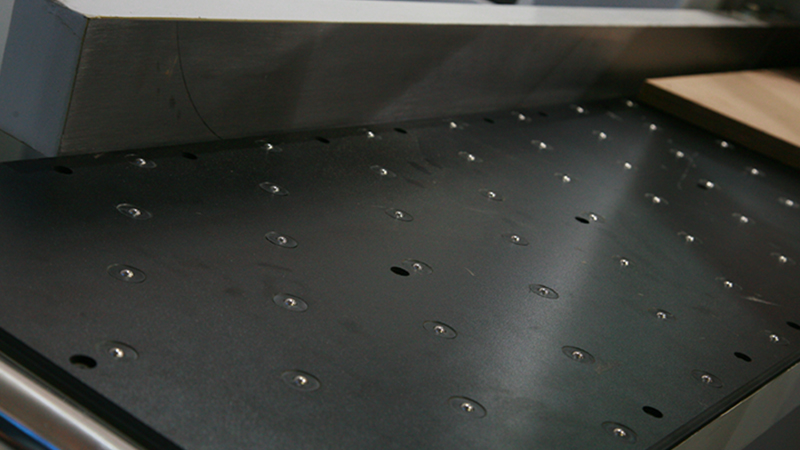
အလုပ်စားပွဲအား Pneumatic Floating Platform ဖြင့်ပြုလုပ်ထားသည်။ ၎င်းသည် ပြားများကိုရွှေ့ရန် အလွန်လွယ်ကူသည်။
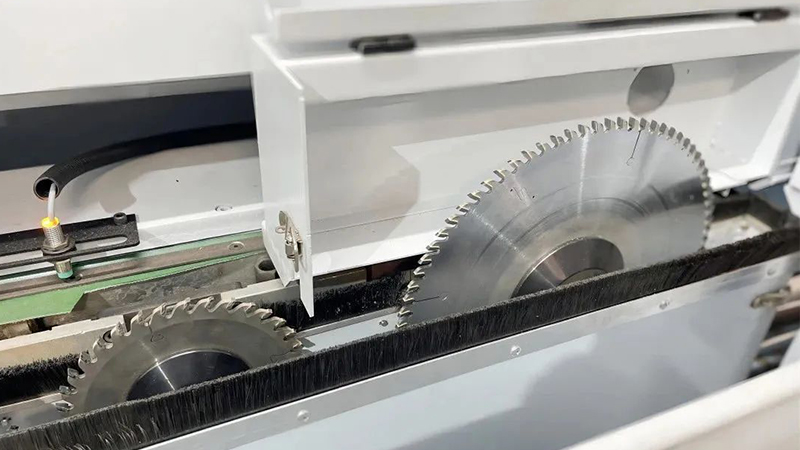
လွှ၏လိုအပ်ချက်အရ အမှတ်ပေးလွှကို အလိုအလျောက်ပြောင်းနိုင်သည်။ အရည်အသွေးမြင့်လွှအတွက် အဓိကလွှနှင့် ပူးပေါင်းဆောင်ရွက်ပါ။
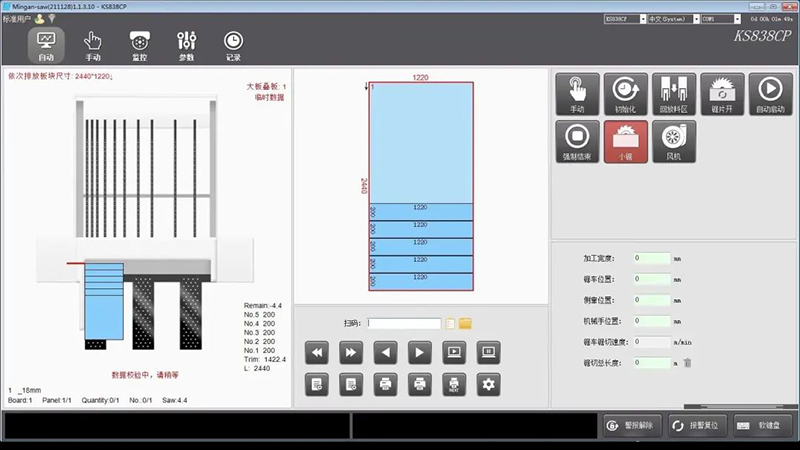
ပစ္စည်း အဆင်အပြင်ကို အလိုအလျောက် ပိုမိုကောင်းမွန်အောင်ပြုလုပ်ရန်အတွက် ရွေးချယ်နိုင်သော အကောင်းဆုံးဆော့ဖ်ဝဲ
နမူနာ